GetriebeschrittmotorenSchrittmotoren sind eine beliebte Art von Untersetzungsgetrieben, wobei die 12-V-Variante besonders verbreitet ist. Dieser Artikel bietet einen detaillierten Einblick in Schrittmotoren, Untersetzungsgetriebe und Schrittgetriebemotoren, einschließlich ihrer Konstruktion. Schrittmotoren sind eine Klasse von Sensormotoren, die Gleichstrom mithilfe einer elektronischen Schaltung in einen mehrphasigen, sequenziell gesteuerten Strom umwandeln. Dieser Prozess ermöglicht den Betrieb des Schrittmotors. Der Treiber, der als sequenzieller Controller für mehrere Phasen dient, versorgt den Schrittmotor mit einer zeitgesteuerten Stromquelle.
Schrittmotoren sind Motoren mit offener Regelung, die elektrische Impulssignale in Winkel- oder Linearbewegungen umwandeln. Als wichtige Aktoren in modernen digitalen Steuerungssystemen werden sie aufgrund ihrer Genauigkeit geschätzt. Die Drehzahl und die Endposition des Motors werden durch die Frequenz und Anzahl der Impulse im Signal bestimmt und bleiben von Laständerungen unbeeinflusst. Sobald der Schrittmotortreiber ein Impulssignal empfängt, veranlasst er den Schrittmotor, sich um einen festgelegten Winkel, den sogenannten Schrittwinkel, zu drehen und sich dabei in präzisen, inkrementellen Schritten zu bewegen.
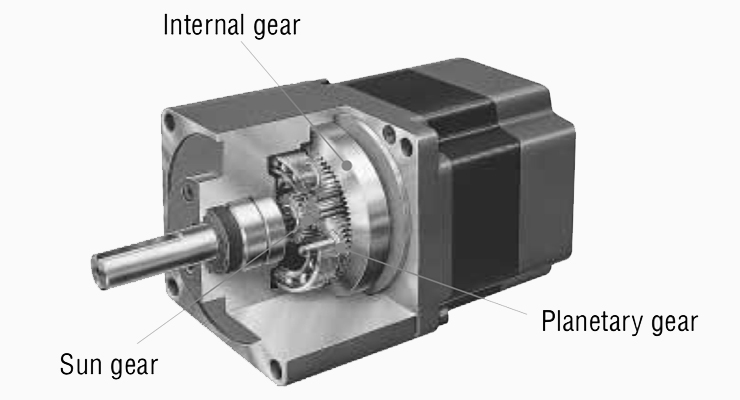
Getriebe sind eigenständige Einheiten, die Zahnrad-, Schnecken- und kombinierte Zahnrad-Schnecken-Getriebe in einem robusten Gehäuse integrieren. Sie werden häufig eingesetzt, um die Drehzahl zwischen den beweglichen Bauteilen und der Arbeitsmaschine zu reduzieren. Das Getriebe optimiert die Drehzahl- und Drehmomentübertragung zwischen der Antriebsquelle und der Arbeitsmaschine. Weit verbreitet inmoderne MaschinenSie werden besonders für Anwendungen bevorzugt, die Folgendes erfordernBetrieb mit niedriger Drehzahl und hohem DrehmomentDas Untersetzungsgetriebe reduziert die Drehzahl, indem ein größeres Zahnrad auf der Abtriebswelle mit einem kleineren Zahnrad auf der Antriebswelle in Eingriff gebracht wird. Mehrere Zahnradpaare können verwendet werden, um das gewünschte Untersetzungsverhältnis zu erreichen. Das Übersetzungsverhältnis wird durch das Zähnezahlverhältnis der beteiligten Zahnräder bestimmt. Als Antriebsquelle für das Untersetzungsgetriebe können Gleichstrommotoren, Schrittmotoren, kernlose Motoren oder Mikromotoren dienen. Solche Geräte werden auch als Gleichstrom-Getriebemotoren, Schrittgetriebemotoren, kernlose Getriebemotoren oder Mikrogetriebemotoren bezeichnet.

Der Getriebeschrittmotor besteht aus einem Untersetzungsgetriebe und einem Motor. Während der Motor hohe Drehzahlen bei geringem Drehmoment ermöglicht und eine erhebliche Bewegungsmasse erzeugt, dient das Untersetzungsgetriebe dazu, diese Drehzahl zu verringern, wodurch das Drehmoment erhöht und die Bewegungsmasse reduziert wird, um die erforderlichen Betriebsparameter zu erfüllen.

Bei jeder Signaländerung dreht sich der Motor um einen festen Winkel, was Schrittmotoren besonders nützlich macht, wenn eine präzise Positionierung erforderlich ist. Stellen Sie sich vordie VerkaufsautomatenWir sehen es überall: Sie verwenden Schrittmotoren, um die Ausgabe der Artikel zu steuern und sicherzustellen, dass immer nur ein Artikel gleichzeitig ausgegeben wird.
Sinbad MotorDas Unternehmen verfügt über mehr als zehn Jahre Erfahrung in der Schrittmotorenbranche und bietet seinen Kunden eine umfangreiche Auswahl an kundenspezifischen Motorprototypen. Darüber hinaus ist es spezialisiert auf die Integration von Präzisionsplanetengetrieben mit maßgeschneiderten Untersetzungsverhältnissen oder passenden Encodern, um schnell Mikrogetriebelösungen zu entwickeln, die exakt auf die Kundenanforderungen abgestimmt sind.
Schrittmotoren ermöglichen die Kontrolle von Bewegungslänge und -geschwindigkeit. Der Unterschied zwischen Schrittmotoren und Getriebeschrittmotoren liegt darin, dass Schrittmotoren eine konstante Geschwindigkeit und Präzision gewährleisten und somit die Einstellung von Dauer und Drehzahl erlauben. Im Gegensatz dazu wird die Drehzahl eines Getriebeschrittmotors durch das Untersetzungsverhältnis bestimmt, ist nicht einstellbar und von Natur aus hoch. Während Schrittmotoren ein geringes Drehmoment aufweisen, zeichnen sich Getriebeschrittmotoren durch ein hohes Drehmoment aus.
Redakteurin: Carina
Veröffentlichungsdatum: 19. April 2024